卡尔曼滤波
本质
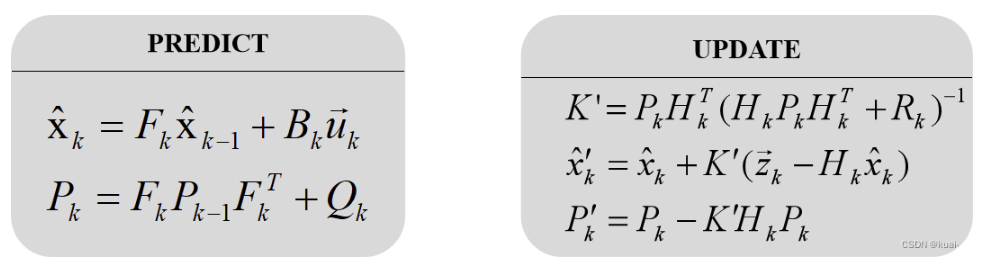
卡尔曼滤波实质就是将预测状态量的高斯分布和观测量的高斯分布做融合,生成一个新的高斯分布,其中新的高斯分布的均值和方差是两个独立的高斯分布的相关参量的加权,这个加权就是卡尔曼增益
但是预测状态量和观测量可能维度不同,需要将他们同时转换到一个向量空间中,所以观测量前面有线性变换矩阵
卡尔曼滤波实质就是将预测状态量的高斯分布和观测量的高斯分布做融合,生成一个新的高斯分布,其中新的高斯分布的均值和方差是两个独立的高斯分布的相关参量的加权,这个加权就是卡尔曼增益
但是预测状态量和观测量可能维度不同,需要将他们同时转换到一个向量空间中,所以观测量前面有线性变换矩阵